
Drone Traffic Management
The UTM development and demonstration test project aims to support the safe and efficient operation of UAS, and to design and establish a low-altitude UTM system.
*UTM (UAS Traffic Management) / *UAS (Unmanned Aerial System)
Research Overview
Low-altitude UTM Development and Demonstration Test for Safe Operation of UAS
*UTM (UAS Traffic Management) / *UAS (Unmanned Aerial System)
4 years and 9 months
-
1st Detailed Project
- Hosted by
KIAST
- Co-hosted by
- kt corp.
- METABUILD CO.,LTD.
- Uconsystem Inc
- Hosted by
-
2nd Detailed Project
- Hosted by
KARI
- Co-hosted by
- kt corp.
- Davo E&C
- BluezenDrone CO.,LTD
- Hosted by
-
3rd Detailed Project
- Hosted by
KAIST
- Co-hosted by
- Seoul National University
- Korea Aerospace University
- Hosted by
- 1st Year Period 2017. 04. 13 ~ 2017. 12. 31 (9months)
- 2st Year Period 2018. 01. 01 ~ 2018. 12. 31(12months)
- 3st Year Period 2019. 01. 01 ~ 2019. 12. 31(12months)
- 4st Year Period 2020. 01. 01 ~ 2020. 12. 31(12months)
- 5st Year Period 2021. 01. 01 ~ 2021. 12. 31(12months)
Project Goal

150m 초과 구역은 유·무인기 통합 관제구역, 150m 이하 저고도 영역에서는 고속이동 비행영역과 안전하고 효율적인 공역관리, 비행체별 운항 규칙에 따른 질서있는 비행이 이루어진다. 저속이동 비행영역은 고밀도 비행환경 고려 안전 운항관리, 보안기술 개발, 불법 비행체 감시 및 대응, 공장, 군사지역, 원전지역은 주요시설 보호로 인해 비행금지영역으로 지정된다, 드론택바, 응급물품수송등과 같은 드론 산업발전을 위한 기반을 구축하는 목표를 가지고있다.
in Low Altitude( lower than 150m) for safe and efficient operations of UAV under 150kg
Conceptual Diagram
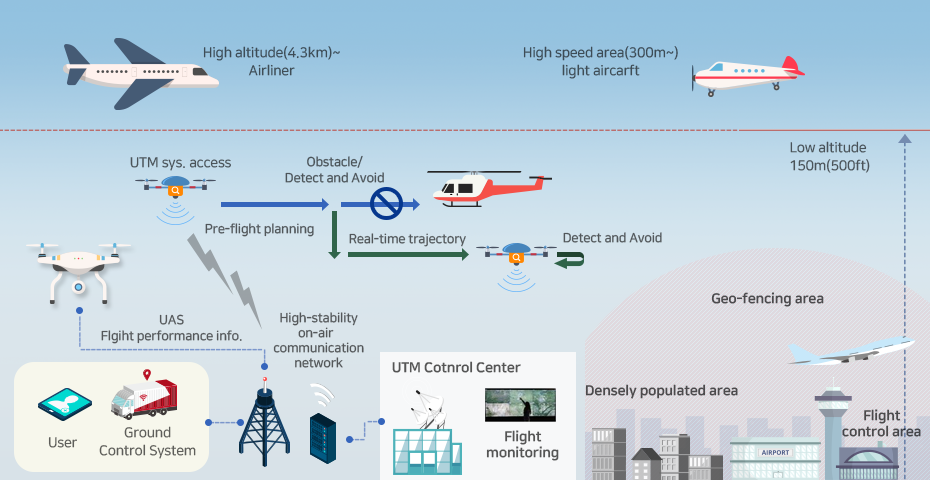
High altitude(4.3km)~ Airliner High speed area(300m~) light weight aircarft UTM sys.access obtacle Detecto and Avoid Low altitude 150m(500ft) Pre-flight planning Real-time trajectory Detect and Avoid UAS Flight performance info. High-stability on-air communication network Geo-fencing area User Ground Control System UTM Control Center Flight monitoring Densely populated area Flight control area
- MSDP ↔ UAS Registration Data ↔ Registration info.
- Trajectory ↔ Weather Data ↔ Weather info.
- Safety Nets ↔ Weather Data ↔ Weather info.
- Mission Flight ↔ ATC Data ↔ Manned Aircraft Flight info.
- Map/DB/Data ↔ Geographic/Airspace Data ↔ Geographic/Airspace info.
- Alert/Message ↔ Business License Data ↔ Business license info.
-
UTM Simulator
- Sim Engine
- Data sychronization
- GCS Sim
- Store/Record
-
Info.Provider
- Regional Aviation Offices
- Meteorological Administration
- Air Traffic Control Center
- Ministry of National Defense
- Ministry of Land, infra & Transport
- Stakeholder
※MSDP:Multi-sensor Surveilance Data Processor
-
User
(Operator)Sets the flight plan, submits it to the registration and history system, conducts the assigned flight duty, and executes set procedures in cases of emergency
-
UTM System and Control Center
Acquires external flight information from the UTM System, determines approval or rejection of flight requests, and monitors real-time flight conditions
-
External Linkage System
Collects flight information from external aviation-related institutes (NOTAM, meteorological data, and others)
-
UTM
SimulatorSaves and collects flight duty data